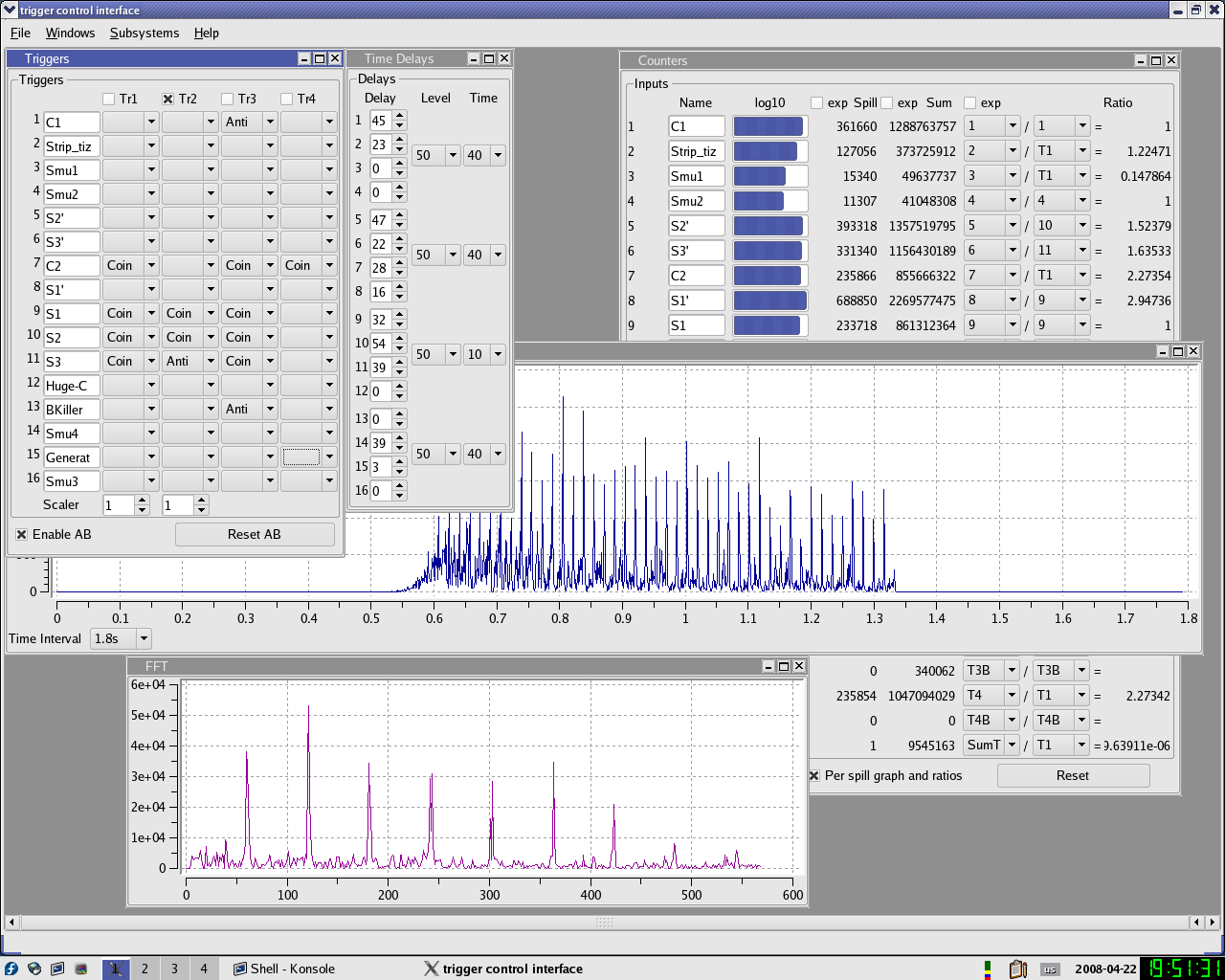
Язык - python. GUI - PyQt3. Доступ к модулям через VME-шный драйвер и самописанную библиотеку (на С + биндинг в python), скрывающую детали контроллеров корзин, их внешней шины и её контроллера. Детали - далее в обсуждении.

Ответ на:
комментарий
от anonymous

Ответ на:
комментарий
от michwill

Ответ на:
комментарий
от anonymous

Ответ на:
комментарий
от Sikon
Ответ на:
комментарий
от anonymous

Ответ на:
комментарий
от michwill
Ответ на:
комментарий
от filin
Ответ на:
комментарий
от filin


Ответ на:
комментарий
от anonymous
Ответ на:
комментарий
от anonymous
Ответ на:
комментарий
от stalkerg
Ответ на:
комментарий
от filin
Ответ на:
комментарий
от Bioreactor
Ответ на:
комментарий
от filin
Вы не можете добавлять комментарии в эту тему. Тема перемещена в архив.
Похожие темы
- Галерея Управление триггером физической установки: веб-интерфейс (2008)
- Форум [Непонятно же] Tk (2008)
- Форум триггер на основе скорости физического соединения порта (2015)
- Форум Триггеры (2017)
- Форум Поиск оригинала чипа (2015)
- Форум Zabbix триггер (2020)
- Форум Mysql триггеры. (2012)
- Форум [вещества] триггеры (2010)
- Форум [СУБД] Триггеры (2010)
- Форум postgres. триггер (2007)